Weikai Lin 林惟凱

I am a Computer Science Ph.D. student at University of Rochester, advised by Yuhao Zhu. Previously, I earned B.E. in Electronic Engineering from Tsinghua University and M.Sc. in Intelligent Science from Peking University.
Research. I am interested in end-to-end hardware-software co-design. My publications span AR/VR, AI, and imaging systems. More details are available on my research page.
I am also an AI maximalist interested in Autoresearch/AI4S, aiming to accelerate scientific discovery by orders of magnitude and unlock research that was previously impossible.
Email / CV / Google Scholar / LinkedIn / GitHub
🔥 News
| Jul 13, 2026 | LowPowAR is accepted to TVCG 2026 (ISMAR Journal Track). |
|---|---|
| Jul 10, 2026 | UniMod is accepted to ACM MM 2026. |
| Jun 18, 2026 | ControlHair is accepted to ECCV 2026. |
| May 18, 2026 | I have joined Meta as a Research Scientist Intern. |
| Apr 21, 2026 | Two papers accepted to CVPR 2026 On-Sensor Vision Workshop. See you in Denver! |
| Apr 09, 2026 | One paper selected as CVPR 2026 Highlight. |
| Apr 01, 2026 | Received ACM/IEEE DAC Young Fellow. See you in Long Beach! |
| Feb 23, 2026 | One paper accepted to DAC 2026. |
| Feb 21, 2026 | One paper accepted to CVPR 2026. |
| Sep 19, 2025 | Our paper, PowerGS, accepted to Siggraph Asia 2025. See you in Hong Kong. |
| Apr 01, 2025 | Our paper, Metasapiens, received ASPLOS’25 Best Paper Award. |
| Mar 22, 2025 | Our paper, Lumina, accepted to ISCA 2025. |
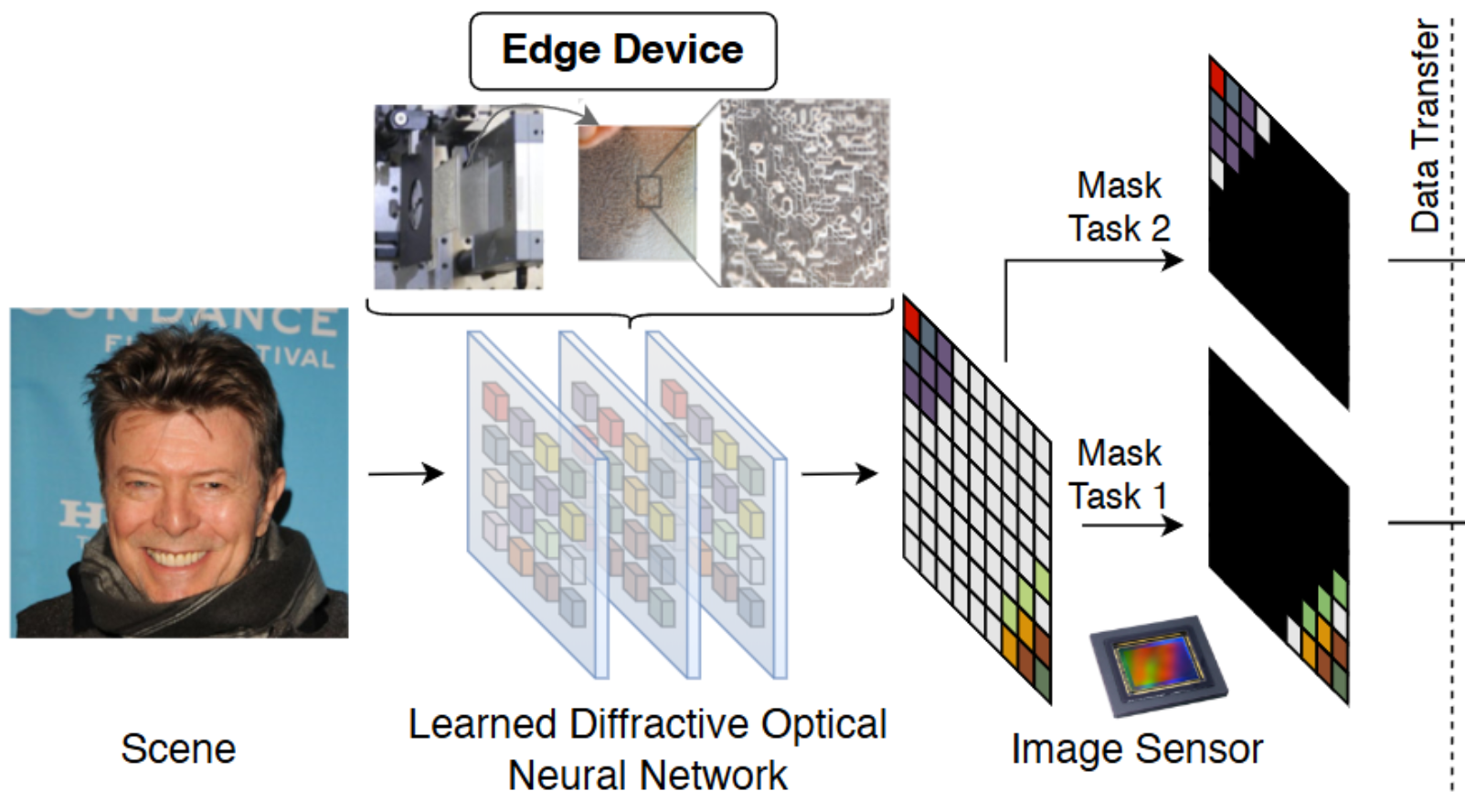
| Feb 15, 2025 | Our paper, SnapPix, accepted to DAC 2025. |
| Jan 31, 2025 | Awarded the OpenAI Research Access Grant. |
| Jan 28, 2025 | Our paper, StreamGrid, accepted to ASPLOS 2025. |
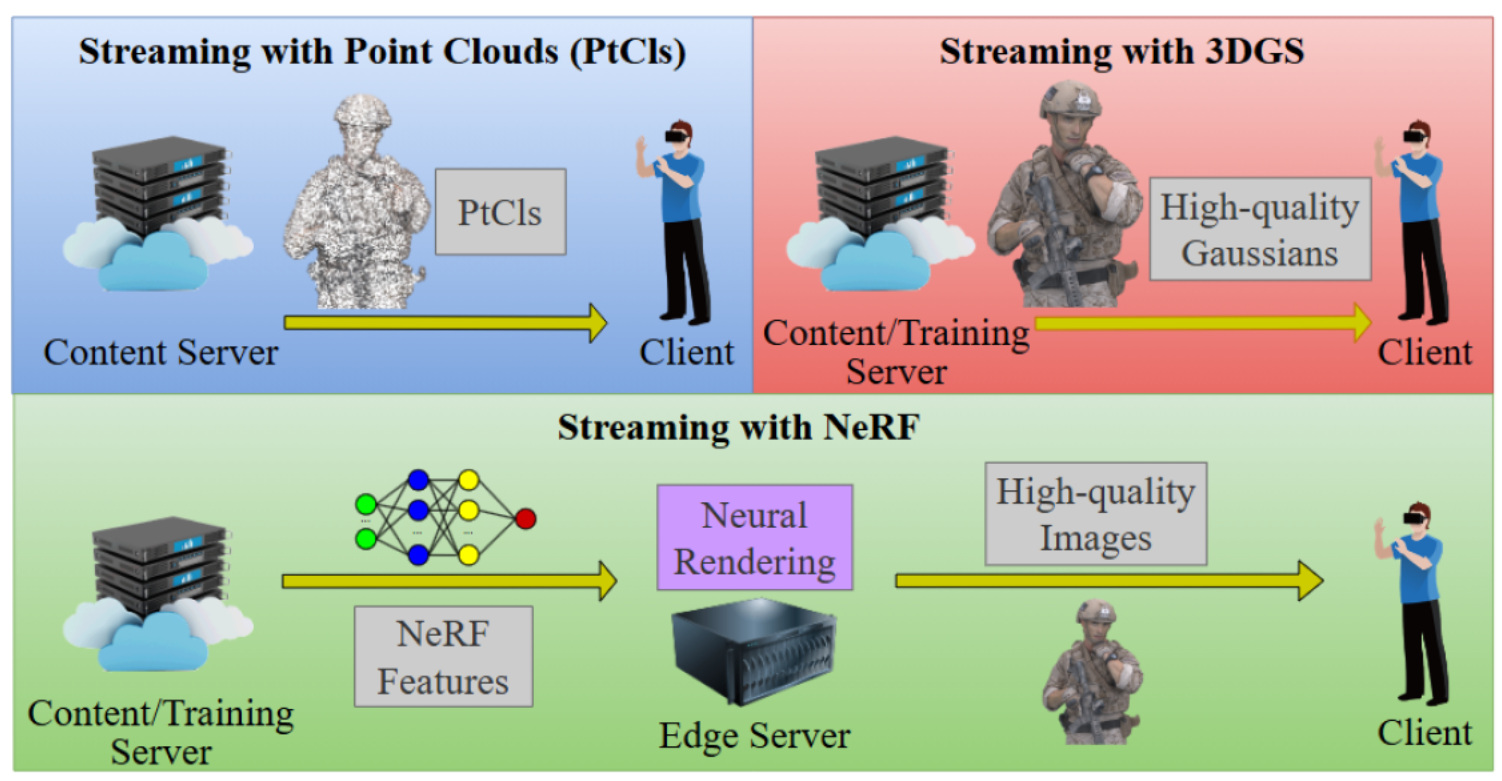
| Dec 16, 2024 | Our paper on streaming 3DGS accepted to HotMobile 2025. |
| Oct 28, 2024 | Our paper, PrivateEye, accepted to WACV 2025. |
| Oct 02, 2024 | Our paper, Metasapiens, accepted to ASPLOS 2025. |
📝 Publications
* Indicates equal contributions, some papers are highlighted. See Google Scholar for full list.
2026
- TVCG
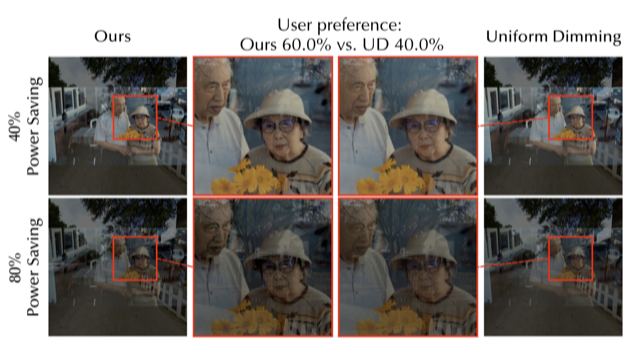 In IEEE Transactions on Visualization and Computer Graphics (ISMAR Journal Track), 2026
In IEEE Transactions on Visualization and Computer Graphics (ISMAR Journal Track), 2026 - ECCV
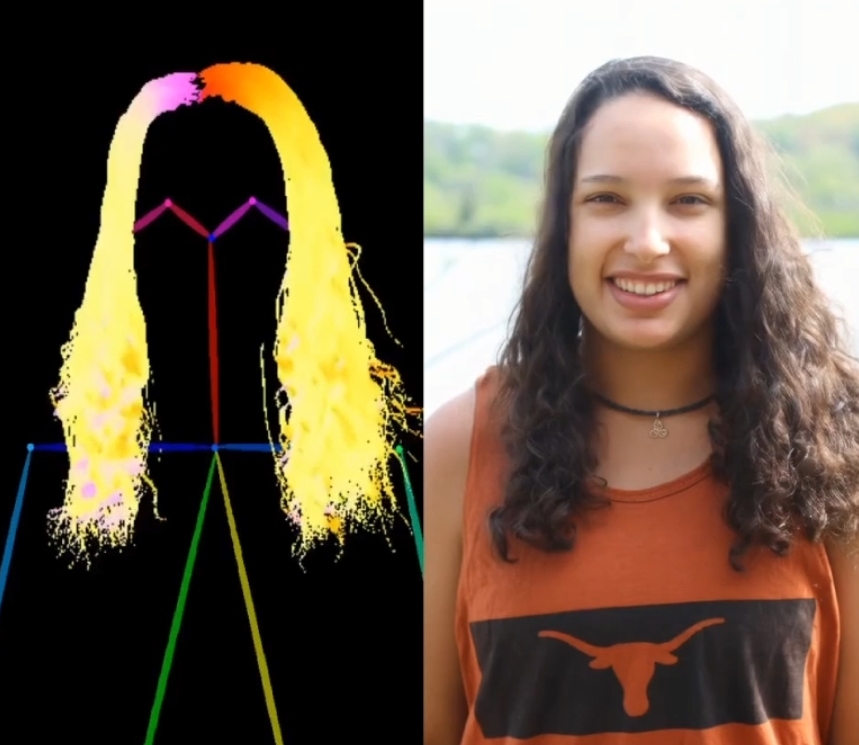 In 19th European Conference on Computer Vision, 2026
In 19th European Conference on Computer Vision, 2026 - ACM MM
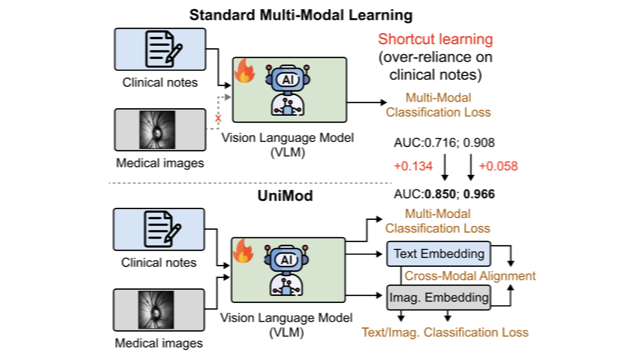 UniMod: Enhancing Multi-Modal Medical Diagnosis through Cross-Modality and Within-Modality AlignmentIn 34th ACM International Conference on Multimedia, 2026
UniMod: Enhancing Multi-Modal Medical Diagnosis through Cross-Modality and Within-Modality AlignmentIn 34th ACM International Conference on Multimedia, 2026 - DAC
 In 63rd ACM/IEEE Design Automation Conference, 2026
In 63rd ACM/IEEE Design Automation Conference, 2026 - DAC
 In 63rd ACM/IEEE Design Automation Conference, 2026
In 63rd ACM/IEEE Design Automation Conference, 2026 - CVPR
 🌟 CVPR HighlightIn IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2026
🌟 CVPR HighlightIn IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2026




2025
- SIGGRAPH Asia
 In SIGGRAPH Asia Conference Papers, 2025
In SIGGRAPH Asia Conference Papers, 2025 - DAC
 In 62nd ACM/IEEE Design Automation Conference, 2025
In 62nd ACM/IEEE Design Automation Conference, 2025 - ASPLOS
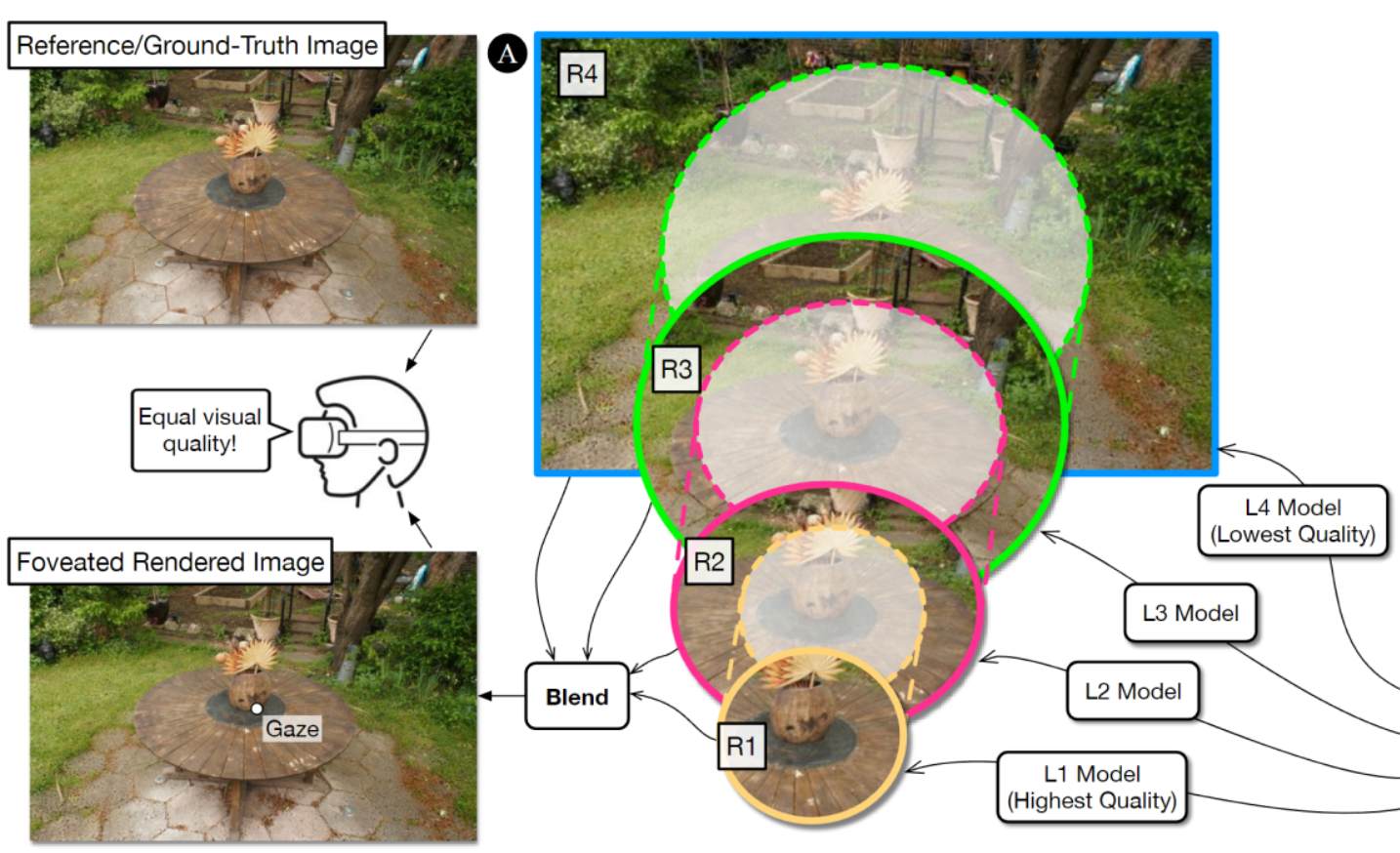 🏆 Best Paper AwardIn 30th ACM International Conference on Architectural Support for Programming Languages and Operating Systems, 2025
🏆 Best Paper AwardIn 30th ACM International Conference on Architectural Support for Programming Languages and Operating Systems, 2025
- ASPLOS
 In 30th ACM International Conference on Architectural Support for Programming Languages and Operating Systems, 2025
In 30th ACM International Conference on Architectural Support for Programming Languages and Operating Systems, 2025 - ISCA
 In 52nd IEEE/ACM International Symposium on Computer Architecture, 2025
In 52nd IEEE/ACM International Symposium on Computer Architecture, 2025 - WACV
 In IEEE/CVF Winter Conference on Applications of Computer Vision, 2025
In IEEE/CVF Winter Conference on Applications of Computer Vision, 2025 - HotMoblie
 In 26th International Workshop on Mobile Computing Systems and Applications, 2025
In 26th International Workshop on Mobile Computing Systems and Applications, 2025








2024
- TACO
 In ACM Transactions on Architecture and Code Optimization, 2024
In ACM Transactions on Architecture and Code Optimization, 2024 - IROS
 In IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024
In IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024 - ArXiv
 (Preprint and Shortened Version of MetaSapiens), arXiv preprint arXiv:2407.00435, 2024
(Preprint and Shortened Version of MetaSapiens), arXiv preprint arXiv:2407.00435, 2024 - Project
 Open-source AR/VR hardware project, 2024
Open-source AR/VR hardware project, 2024




2023
- ROMANIn 32nd IEEE International Conference on Robot and Human Interactive Communication, 2023
- PKU ASN
2021
- ICDLIn IEEE International Conference on Development and Learning, 2021
- ICDLIn IEEE International Conference on Development and Learning, 2021